У овом делу чланка сазнајемо о иновативној методи претварања механизма за притискање педале у електричним возилима у одговарајући променљиви електрични сигнал, који се може даље користити за обраду контроле брзине возила.
Објашњени концепт радиће као електронски гас, који ће линеарно повећавати брзину возила када се педала постепено притиска, и обрнуто, користећи ПВМ технологију
Идеју је затражио господин Локеш Маини
Техничке спецификације
Ја сам механичар, тренутно радим на електричном возилу и желим да контролишем брзину мотора помоћу педале. Не добивам контролер за мотор, помозите ми да направим свој
захвалан
Спецификације мотора су 36волт, 43амп и 1,5хп четкани једносмерни мотор.
Механички дизајн
Електронска верзија педале гаса првенствено ће захтевати механизам за прво претварање механичког притискања педале у одговарајући променљиви електрични сигнал, тако да се овај сигнал може обрадити кроз фазу процесора сигнала за жељену конверзију у практичну контролу брзине возило.
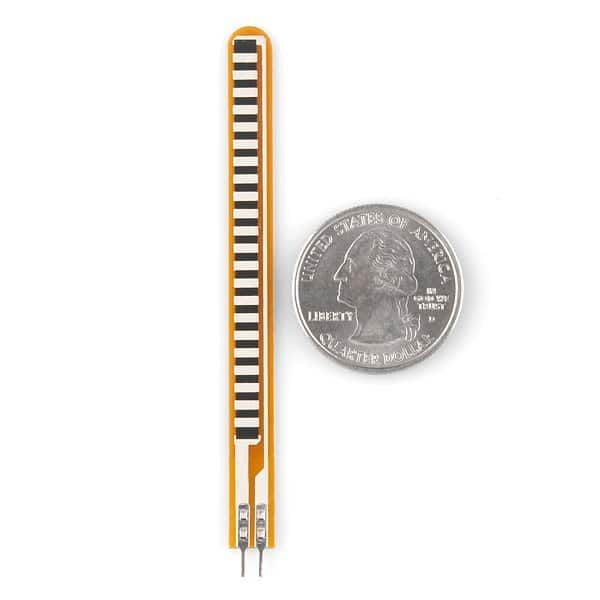
Многи концепти се могу испробати, на пример употребом пиезо сензора оптерећења, капацитивног сензора оптерећења, резонантним сензором итд. У овом чланку научићемо много једноставнију методу коју сам ја осмислио која укључује ЛЕД / ЛДР склоп за постизање истог .

У електромеханичком распореду приказаном на горњој слици, можемо видети следеће интегрисане компоненте:
Мали зупчаник причвршћен вијчаним механизмом.
Глава завртња која има бијелу мат површину рефлектора
Склоп ЛЕД / ЛДР постављен испред главе вијка.
Како функционише предложени механизам.
Зупчаник приказан на горњој слици треба закључати другим зупчаником који има однос који може бити 10 пута већи од овог зупчаника.
Већи зупчаник мора бити конфигурисан са механизмом педале тако да покреће ротационо кретање као одговор на притискање педале.
Закретни одзив зупчаника заузврат ће произвести кретање главе завртња напред кроз комору у којој се налази склоп ЛЕД / ЛДР.
Процес ће узроковати да ЛДР прими пропорционално различиту количину одбијене светлости од ЛЕД диоде.
Ови променљиви подаци (у облику променљивог отпора) који одговарају притиску на папучицу могу се затим послати у коло процесора сигнала за спровођење предвиђене контроле брзине одређеног возила.
У следећи пост научићемо фазу процесора сигнала користећи ПВМ технику.
У горњи одељак сазнали смо за једноставан склоп електромеханичког претварача за трансформисање дејства педале у пропорционално променљив електрични сигнал.
Претварање акције педале у ПВМ
Сада проучимо примену кола која ће нам омогућити да електрични сигнал педале претворимо у одговарајуће променљиви ПВМ сигнал за предвиђену контролу брзине мотора возила.

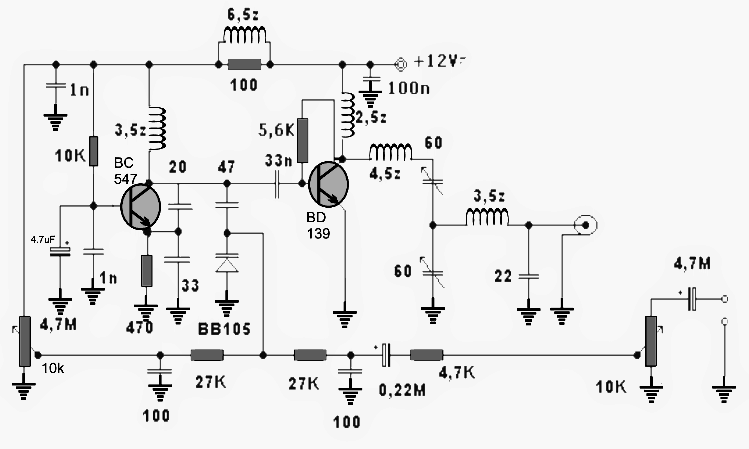
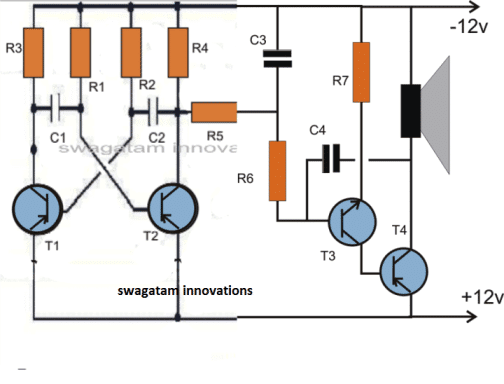
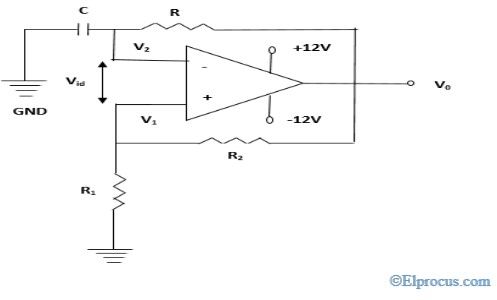
Позивајући се на горњи дијаграм кола, рад кола можемо проценити помоћу следећих тачака:
ИЦ1 је конфигурисан као импулсни генератор од 80Хз који има максимално време укључивања и минимално време искључивања као свој радни циклус
ИЦ2 је намештен као компаратор који прво претвара горњи импулс од 80Хз примењен на његовом пин2 са таласима троугла генерисаним на његовом пин6 и упоређује таласе троугла са модулационим напоном који је доступан на његовом пин5.
Модулациони напон пин5 изведен је из емитора БЈТ БЦ547 који је конфигурисан као заједнички колектор са базом повезаном са ЛДР улазима постигнутим помоћу деловања педале.
Различити отпори као одговор на притискање педале упоређују се са унапред подешеном поставком од 100К и развија се пропорционална величина напона у основи транзистора који претвара улаз слабе струје у еквивалентни сигнал велике струје преко пин5 ИЦ2.
Овај тренутни ниво потенцијала прихвата и обрађује ИЦ2 генеришући пропорционалну величину ПВМ сигнала за МОСФЕТ и прикључени мотор.
На тај начин се брзина мотора контролише и варира у зависности од флуктуирајућих ПВМ-а као одговор на притиске на папучице возила.
Горе наведени поступци ефикасно претварају радње педале у контролисани рад мотора возила и његову брзину.
Како поставити круг.
Веома је лако.
- Притисните папучицу до максималне тачке тако да глава вијка досегне у најближи могући положај испред ЛЕД / ЛДР склопа.
- Следеће подесите унапред подешену вредност 100 к док пин3 ИЦ2 не почне да генерише ПВМ-ове са максималном ширином, то се може потврдити мерењем напона на пин3 да буде што ближи напону напајања кола, односно 5В.
- Једном када се то уради, могло би се претпоставити да је поступак постављања завршен.
- Резултати се сада могу верификовати притиском на педалу на различитим нивоима и провером да се брзина мотора разликује на идентичан начин.
Претходно: Једноставни ЕСР мерни круг Следеће: Како направити растући круг светлости