
ВСГ-ДСА је захватни прст који интегрише тактилни сензор за повратне информације о профилу високе резолуције током хватања. У сврху очитавања користи ДСА9205и интелигентни тактилни претварач. Одговара на основну чељуст ВСГ-а и директно је повезан са хватаљком кроз интегрисани прикључак сензора у основној чељусти, тако да нису потребне спољне компоненте и каблови који укључују тактилни уређај у ваше апликације за руковање. Ове врсте сензора за прсте су аутоматски откривене и параметризоване од стране ВСГ. Профил притиска се може користити изнутра контролера хватача помоћу моћног интерфејса за скриптовање. Овај чланак говори о врстама тактилних сензори и њихов рад .
Шта је тактилни сензор?
Тактилни сензор је уређај. Он мери долазеће информације као одговор на физичку интеракцију са околином. Осећај додира код људи се углавном моделира, тј. Кожни осећај и кинестетички осећај. Кожни додир има способност откривања надражаја који су резултат механичке стимулације, бола и температуре. Кинестетички додир прима сензорске улазе од рецептора присутних унутар мишића, тетива и зглобова.

Тактилни сензор
Врсте тактилних сензора
Постоје различите врсте тактилних сензора који су дати у наставку
- Сензор силе / обртног момента
- Динамички сензор
- Термички сензор
Сензор силе / обртног момента
Сензори силе / обртног момента користе се у комбинацији са тактилним низом да дају информације за контролу силе. Ове врсте сензора може да осети оптерећење било где попут дисталне везе манипулатора и ограничено као сензор коже. Сензор коже углавном пружа тачније мерење силе при већим пропусним опсезима. Ако је веза манипулатора дефинисана генерално и претпоставља се контакт сигналне тачке, тада сензор силе / обртног момента може дати информације о месту контакта силе и тренутака - назива се интринзичним тактилним осетљивањем. Слика сензора обртног момента приказана је испод.

Сензор силе или момента
Динамички сензор
Динамички сензори су мањи акцелерометри на тракама прстију или на кожи роботског прста. Општа функција попут Пацинових телесних тела код људи и имају подједнако велика одговарајућа поља, па је један или два акцелерометар коже довољан за цео прст. Ови сензори ефикасно откривају стварање и прекид контакта, вибрације повезане са клизањем преко текстурних површина.

Динамички сензор
Сензор брзине напрезања је друга врста динамичког тактилног сензора. Ако врх прста клизи брзином од неколико цм / с укупних малих неравнина или јамица на површини, привремене промене на кожи постале су важне. Пиезоелектрични полимер као што је ПВДФ производи наелектрисање као одговор на оштећења која се могу применити за стварање струје која је директно пропорционална опсегу промена.
Термички сензор
Термички сензори су важни за људску способност да идентификује материјале направљених предмета, али неки се користе и у роботици. Термичко осетљивост укључује откривање термичких градијената у кожи који одговарају температури и топлотној проводљивости предмета. Роботски топлотни сензори су укључени у Пелтиерове спојеве у комбинацији са термисторима .

Термички сензор
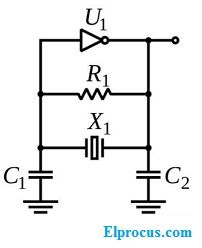
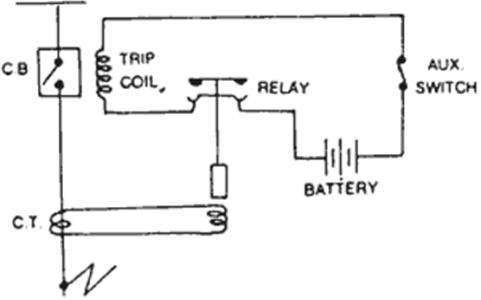
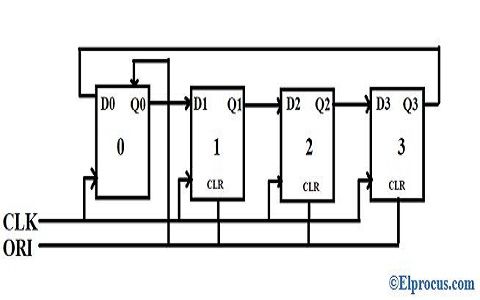
Принцип рада и дијаграм круга тактилног сензора
Тактилни сензори су развијени да пруже тактилне сензорске способности за теле-оперативне манипулаторе и интелигентне роботе. Тактилни сензори могу да идентификују нормалну силу која се примењује на тактилне пикселе за очаравање контроле силе и тактилних слика и за генерисање препознавања предмета. Међутим, за добијање тактилних слика и нормалних сила, информације о тангенцији су кључне за контролу силе и спречавање клизања, што је очаравајуће за успех задатка - стога су потребни тродимензионални тактилни сензори.

Кружни дијаграм тактилног сензора
Постоји неколико тродимензионалних тактилних сензора развијених помоћу Пиезоресистиве, капацитивних и опционих сензорских елемената, а ове тактилне сензоре производи МЕМС технологија . Интегрисани сензорски елементи и кругови за предобраду служе за компактност, али они су преслаби и лако се ломе за већину примена, на пример, опсег силе тактилног сензора је само 0,01 Н в4к, а остали тактилни сензори нису обезбеђује МЕМС технологија. Доња шема кола приказује тактилни сензорски круг.
Тактилни сензор у роботици
Тактилни сензор који се користи у НАСА-иним роботима дат је у наставку
- Један од примера који се директно односи на истраживање планета.
- НАСА користи ове сензоре на међународној свемирској станици за помоћ људима у поправци / одржавању у животној средини
- НАСА је испробала многе тактилне сензоре у роботици који су у почетној фази. Користили су Отпорник за детекцију силе , и сада се користе композити за квантно тунелирање
- Вишеструки тастери за учитавање и ћелије постају пракса да се развијају тактилни сензори које производи индустријски робот
Тактилни сензори
Додирни апликације сензора користе се у
- Роботика
- Рачунарски хардвер
- Сигурносни систем
- Екран осетљив на додир уређаји на мобилном телефону
- Рад на рачунару
Предности тактилног сензора
Предности тактилног сензора дате су у наставку:
- Они нуде тактилна решења сензора која се лако користе
- Тактилни сензор нема спољне компоненте и каблове
- Компактна екстракција
- Верификована тактилна технологија очитавања из роботике.
Овде се ради о принципу рада и примени тактилног сензора. надамо се да су дате информације корисне у пружању добрих информација и разумевању пројекта. Даље, ако имате било каква питања у вези са овим концептом на електрични и електронски пројекти , можете коментарисати у одељку испод. Ево питања за вас - које су функције тактилних сензора?
Фото кредити:
- Тактилни сензор квадратни простор
- Сензор силе / обртног момента трансдуцертецхникуес
- Динамички сензор нонијер
- Термички сензор слике-Амазон






{kind=link}
{kind=link}
{kind=link}